Aether Gravitational Lensing
Unveiling the Origins of the Universe with Cutting-Edge Simulations.
2024
Robotics & Autonomous Systems
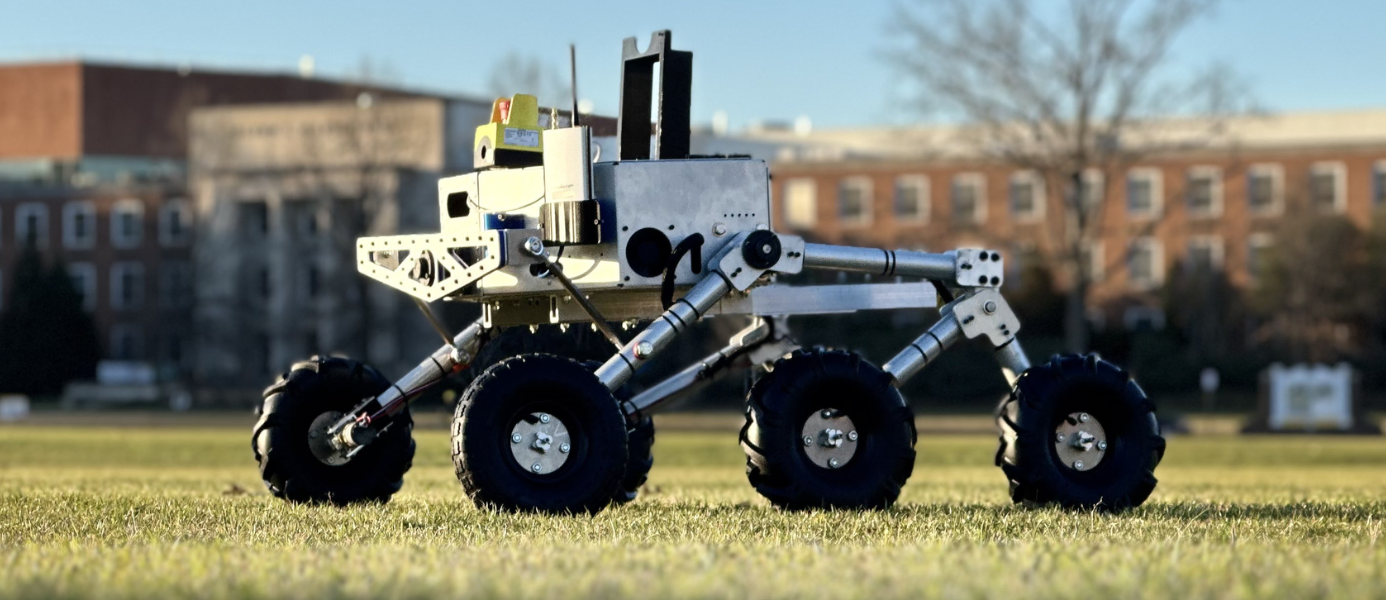
UMD Loop is a competitive engineering team participating in the University Rover Challenge (URC), an annual robotics competition where collegiate teams from around the world design and build Mars rovers. I'm working as an Integration Sub-Team Member, focusing on ensuring seamless communication and functionality across all rover systems.
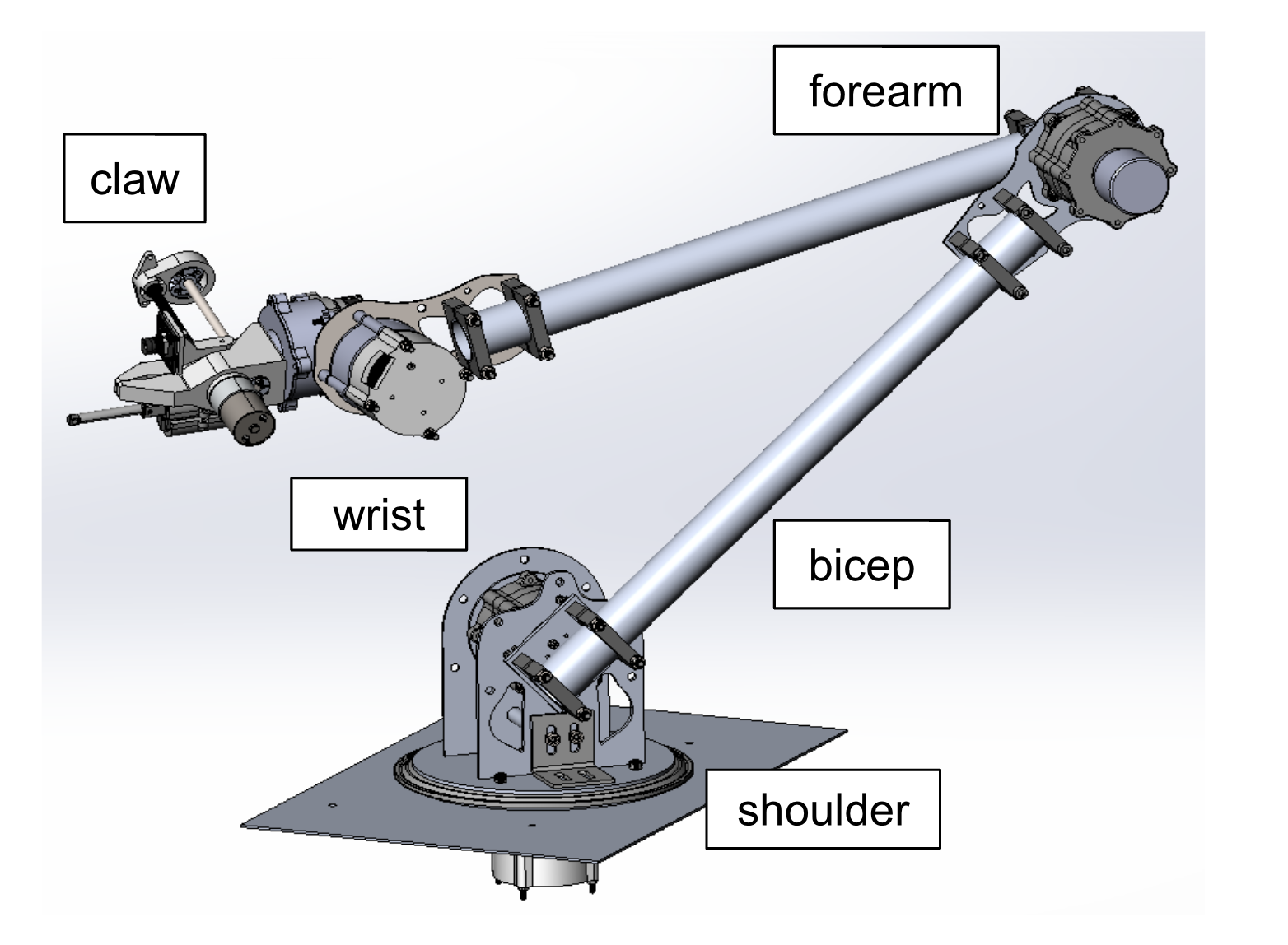
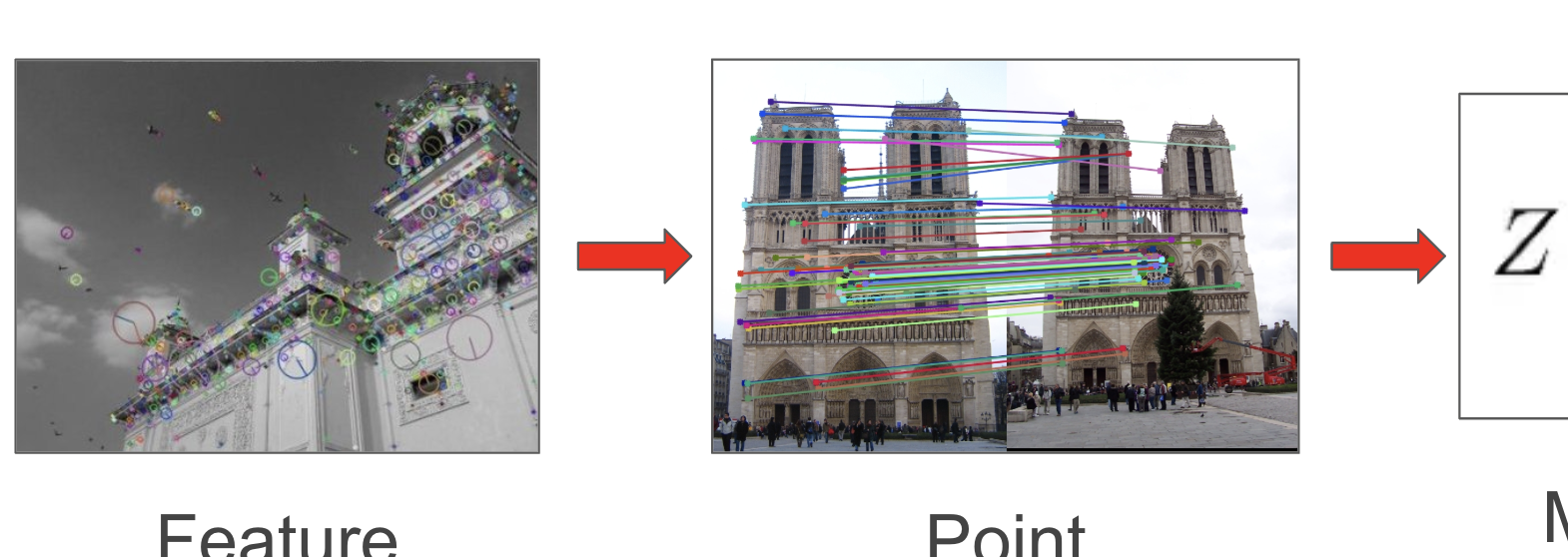
My key contributions include researching and implementing epipolar geometry, stereo camera calibration, and depth estimation to enable precise autonomous movement and obstacle avoidance. I also facilitate CAN protocol-based communication for motor controls and sensor data integration, ensuring real-time responsiveness across the rover. Additionally, I apply advanced computer vision techniques such as Scale-Invariant Feature Transform (SIFT) and disparity mapping for 3D scene reconstruction and stereo vision.
This project is contributing to the broader mission of advancing planetary exploration through hands-on experience in system integration, robotics software development, and cutting-edge computer vision techniques.